Los alumnos del curso de Mecánica Racional (MRA), del programa académico de Ingeniería Industrial y de Sistemas de Campus Lima, pusieron a prueba su creatividad y precisión con mecanismos sin ruedas.
Por Graciela Tuesta. 24 noviembre, 2025.
Estudiantes de la Universidad de Piura (Campus Lima) participaron en la Competencia de mecanismos caminantes sin ruedas (Walkathon 2025) organizado por la Facultad de Ingeniería en este campus.
El evento académico, realizado el miércoles 19, lo dirigió el ingeniero Eliodoro Carrera. El objetivo fue poner a prueba la creatividad, precisión y rigor de los estudiantes quienes diseñaron mecanismos articulados capaces de recorrer la mayor distancia posible con la menor masa estructural.
En este desafío, los equipos de estudiantes desarrollaron prototipos basados en cadenas cinemáticas de un grado de libertad (1 GDL). Para ello, emplearon configuraciones tipo Klann, Hoecken, Theo Jansen y Lambda de Chebyshev, entre otras.
La competencia desafía a los estudiantes a diseñar mecanismos que se desplacen sin ruedas, explorando principios de cinemática, dinámica y optimización estructural. El doctor Carrera destacó el alto nivel de innovación mostrado por los alumnos: “Aquí no gana quien corre más rápido, sino quien piensa mejor su estrategia de movimiento. Con Walkathon 2025, la facultad reafirma su compromiso con el aprendizaje práctico y la formación de ingenieros capaces de transformar ideas en soluciones funcionales y eficientes”, señaló el docente.











Resultados
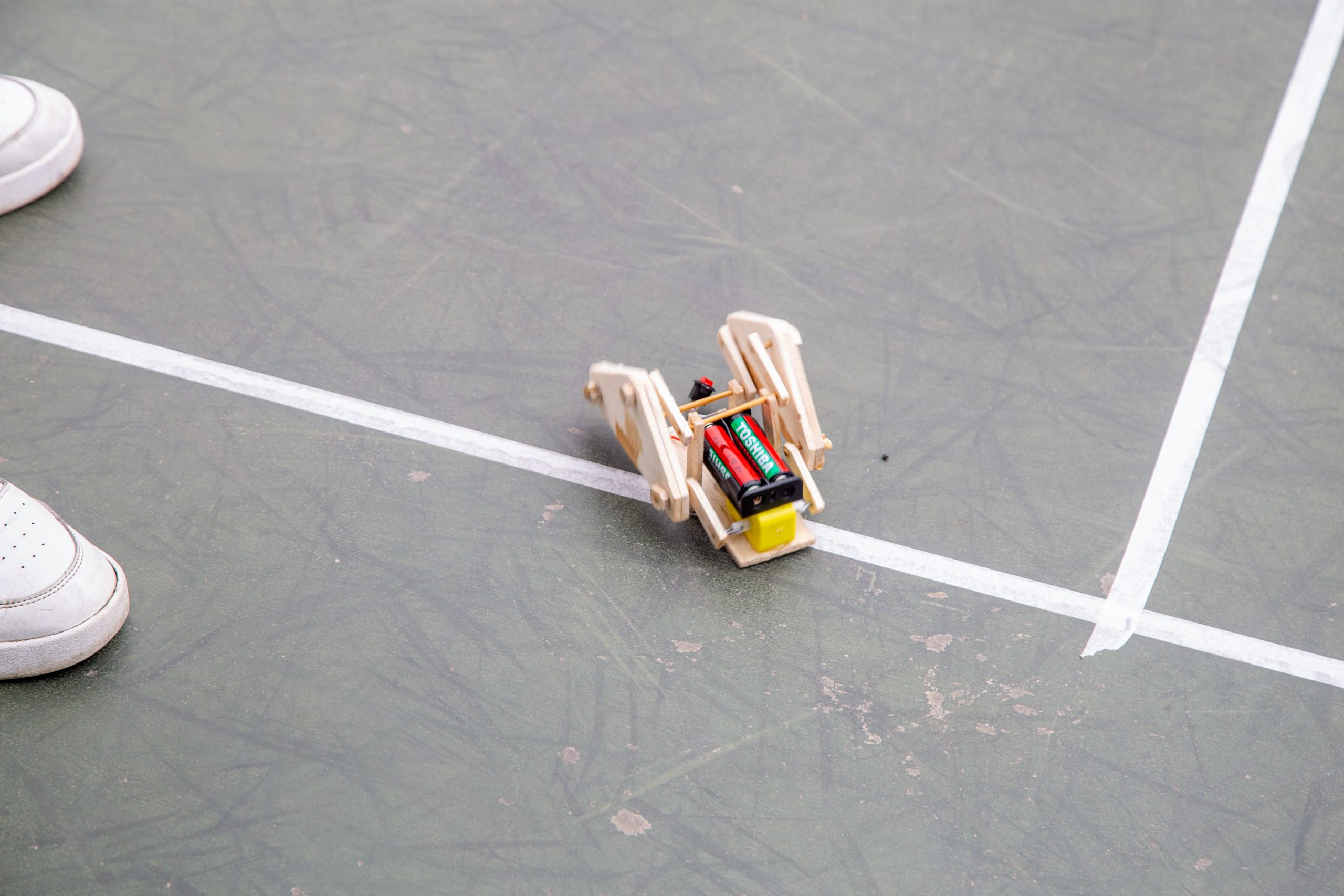
El primer lugar lo obtuvo el equipo 6, cuyo mecanismo de tipo biela–manivela recorrió 4 metros. Gracias a su construcción ultraligera —de apenas 91 gramos—, logró optimizar el parámetro recorrido/peso, lo que le permitió superar al resto de competidores.
El segundo lugar fue para el equipo 2, que presentó un mecanismo tipo Klann, capaz de avanzar 9.12 metros, pero con una masa significativamente mayor (330 gramos), lo que afectó su eficiencia final.







